
 FIDE
FIDE LiDAR-Based Obstacle Avoidance
Published:
Developed LiDAR-based navigation for warehouse robotics.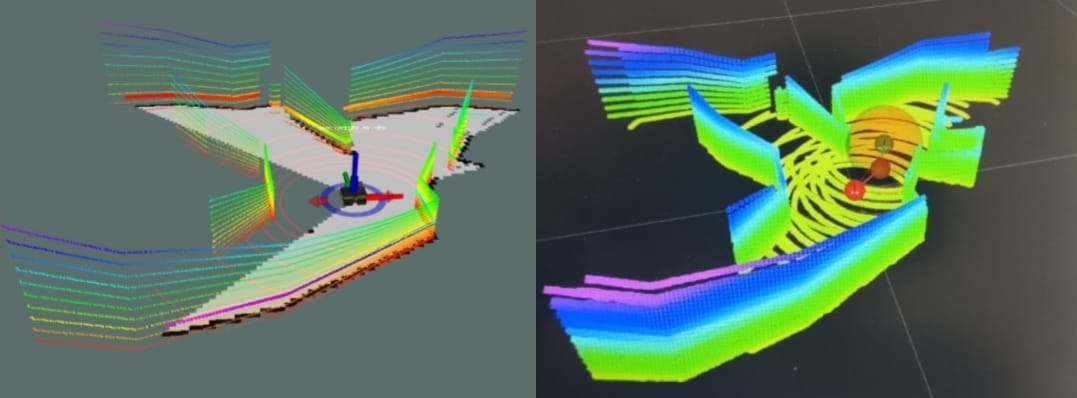
Published:
Developed LiDAR-based navigation for warehouse robotics.
Published:
Designed an electronic voting machine using Proteus software that utilizes voter verification. This project aimed to address the issue of voter fraud and ensure that only eligible voters are able to cast their ballots.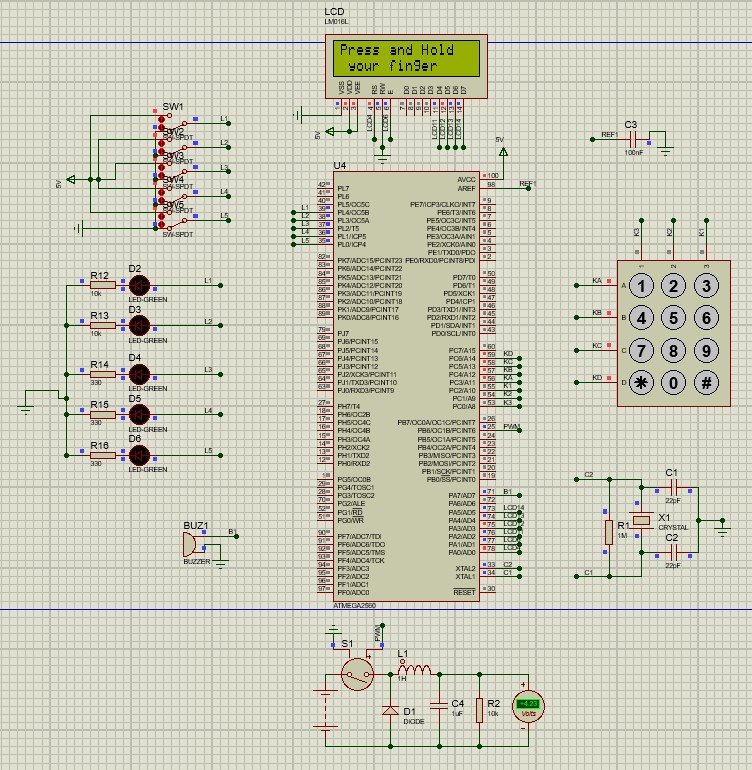
Published:
Created robotic arm for automated vehicle charging.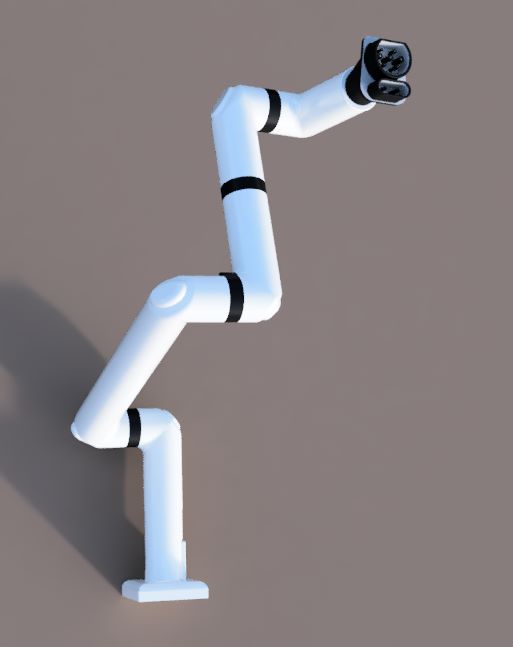
Published:
Developed tools for analyzing wireless channels and Doppler effects.
Published:
Operated Ettus USRP B210 SDR for object distance measurement and radar system design.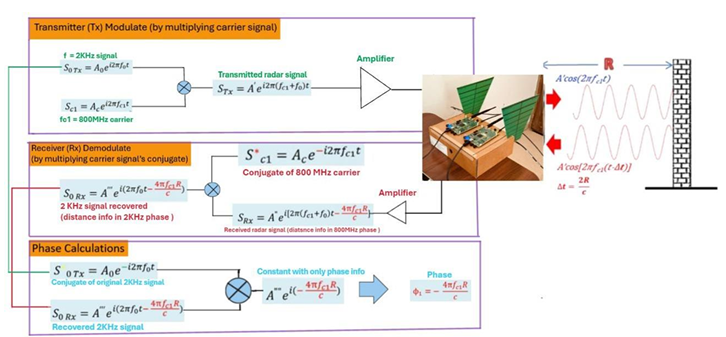
Published:
Accurate ASER estimation for HQAM under AWGN and Rayleigh fading conditions.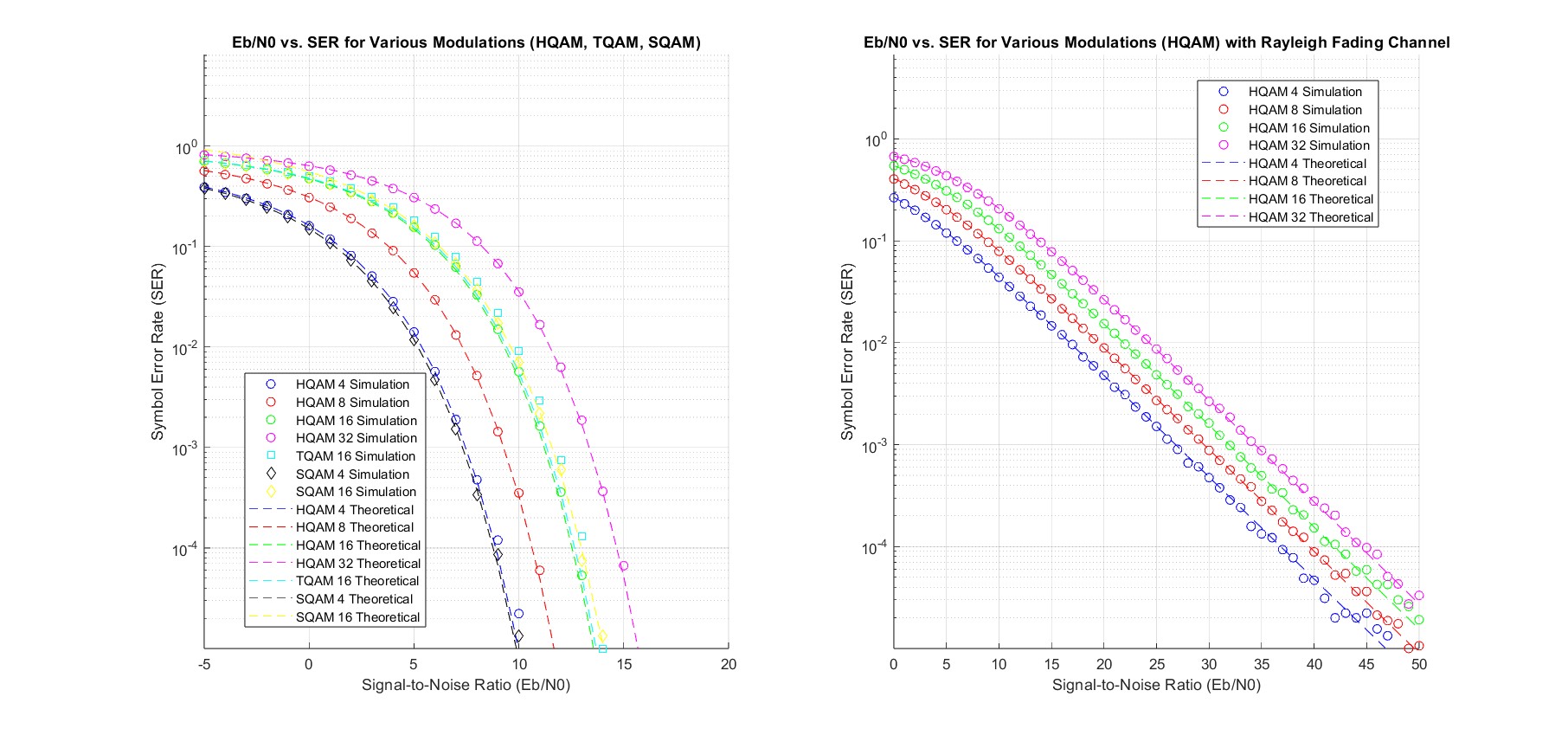
Published:
Designed a fixed-point DSP hardware accelerator for MFCC extraction, implementing pre-emphasis, framing/windowing, 512-point FFT, Mel filterbanks, log scaling, DCT, and liftering in Verilog. Achieved <1% numerical error vs. MATLAB reference with ∼7.7µs latency per frame, enabling real-time speech processing for low-power IoT devices.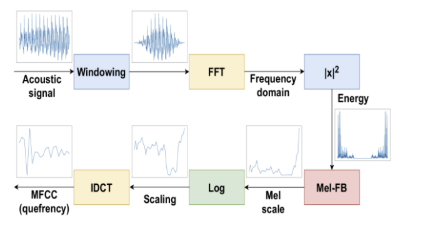
Published in 27th International Symposium on Wireless Personal Multimedia Communications (WPMC), 2024
Millimeter-wave (mmWave) communications offer abundant bandwidth for vehicular networks; however, they are prone to blockages due to buildings, topology, and other environmental factors. To address these challenges, we propose a novel unmanned aerial vehicle (UAV)-aided two-way relaying system to enhance vehicular connectivity and coverage. We formulate a joint optimization problem for relay selection and transmission scheduling to minimize transmission time while ensuring throughput requirements. Proximal policy optimization, deep Q-network, and constraint programming models are employed to solve the optimization problem. Extensive evaluations reveal that the proximal policy optimization model achieves close to 100% accuracy.
Published in 16th International Conference on Computing, Communication and Networking Technologies (ICCCNT), 2025
This paper presents a comparative study of scheduling mechanisms in RIS-assisted wireless networks with non-linear energy harvesting constraints. Four techniques are evaluated: Deep Q-Network (DQN), Constraint Programming (CP), Time Division Multiple Access (TDMA), and random user selection. TDMA and random selection offer simplicity but underperform in dense networks. While CP guarantees optimal decisions, its high computational complexity makes it unsuitable for real-time deployment. The DQN-based approach strikes an effective balance, achieving ~90% of CP’s throughput while reducing decision latency by over 1000x. This highlights DQN as a highly viable solution for real-time scheduling in RIS-enabled networks.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.